强化学习的数学原理-第4课
2025年11月24日
9:21
值迭代和策略迭代(在已知模型表达式的情况下求最优policy)
值迭代
════════════════════════════════════════════════════════════════════════════════════════════════════
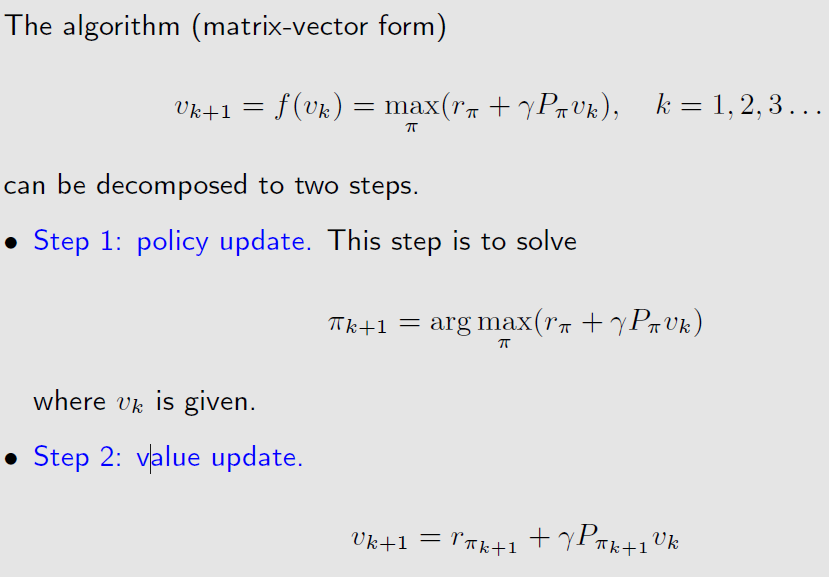
先更新policy,再更新value
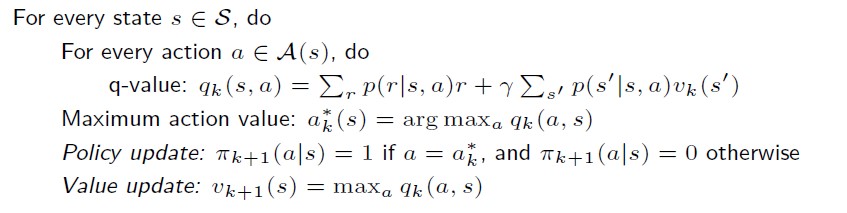
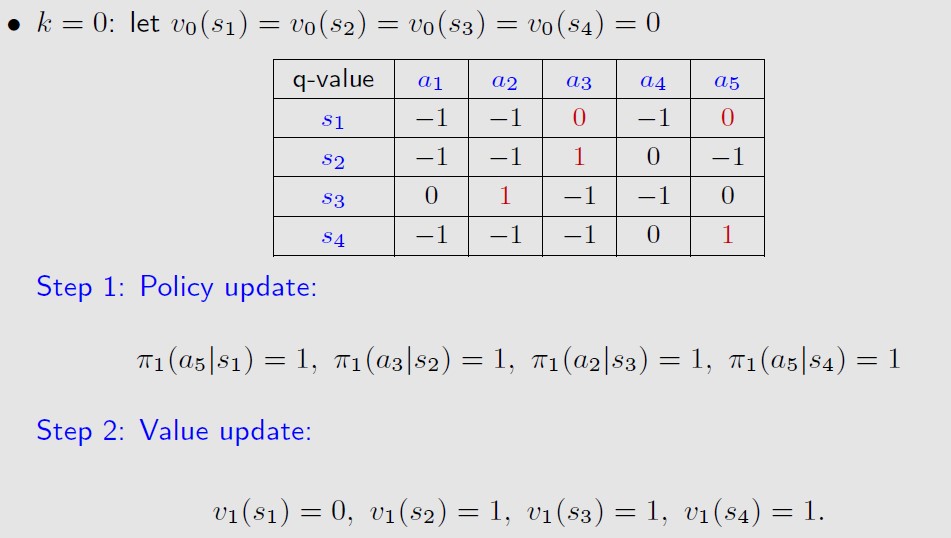
用vk计算出所有的state action value q(s,a),π_k+1就是选择所有q(s,a)最大的那个a。
然后再用π_k+1来得到v_k+1,由于π_k+1就是选择所有q(s,a)最大的那个a,那么v_k+1
就是最大的那个q(s,a)
策略迭代
════════════════════════════════════════════════════════════════════════════════════════════════════
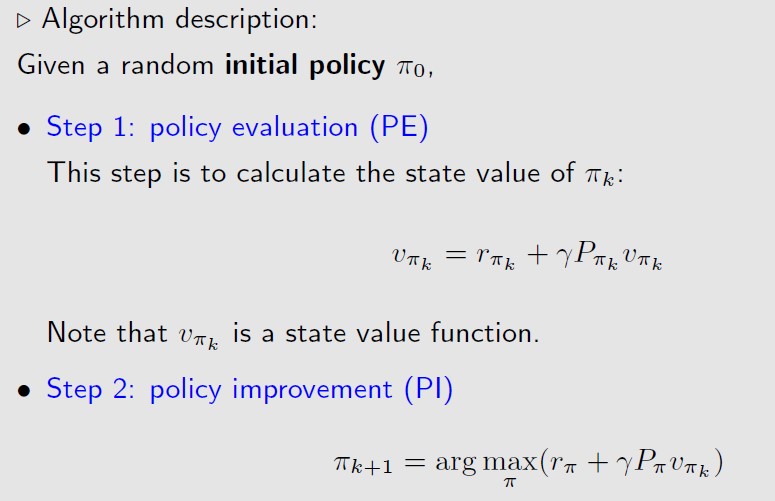
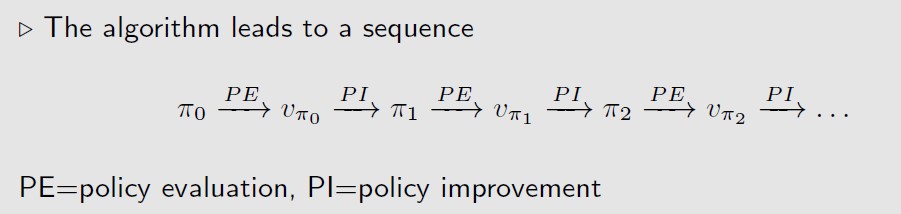
初始化π0,然后进行policy evaluation得到v,再进得policy improvment得到π1….迭代下去
Q1:在policy evaluation时,如何求v?
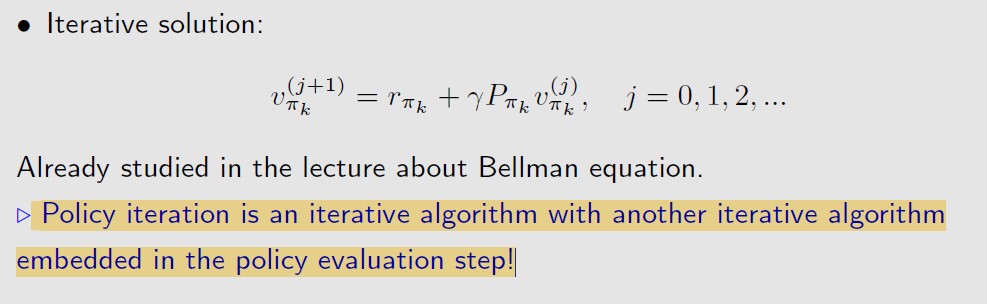
在policy evaluation时,也就是已知policy,求v,可以用迭代的方法。也就是在policy evaluation
这一步,也需要迭代来求解v(外部迭代算法的内部嵌套了迭代算法)。
Q2:在policy improvment时,为什么π_k+1好于π_k?

Q3:为什么这个迭代算法能得到最优策略?
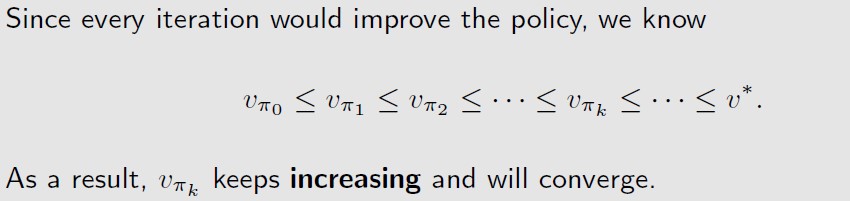
收敛,并且收敛到最优策略,证明过程见书
Truncated policy iteration
════════════════════════════════════════════════════════════════════════════════════════════════════
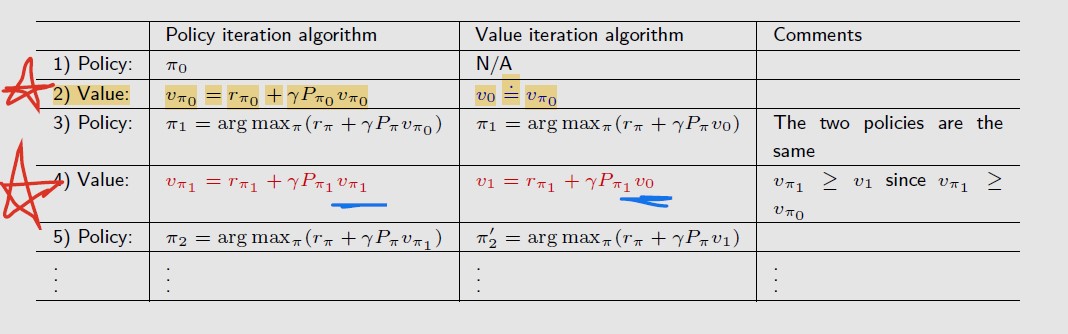
值迭代和策略迭代主要有2个步骤不一样:
1)在上图步骤2中,在初始化第一个v时,值迭代是直接用一个值初始化v0,策略迭代是先初始一个策略π0,然后通过迭代求解bellman公式得到v_π0
2)在上图步骤4中,得到新的策略π1后,值迭代是直接用v0来代入公式得到v1,策略迭代还是要迭代求解bellman
公式得到v_π1
这么来看,其实最主要的区别就一个,就是在求解value的时候,值迭代直接用上一步的value代入公式,得到新的
v;策略迭代把上一步的value舍弃了,重新迭代求解bellman公式,得到新的v。
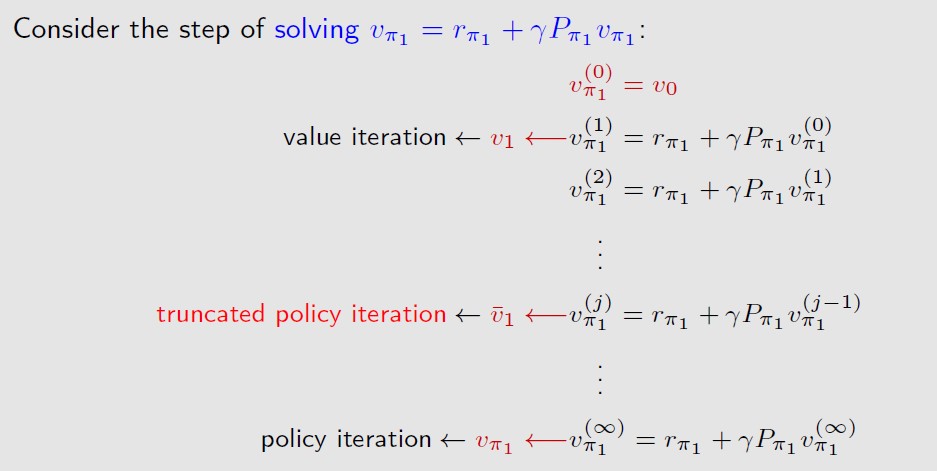
Policy iteration在迭代求解bellman公式得到新的v时,也是需要初始化v0,然后一步一步迭代直到收敛,
每一步如下图
![]()
那么value iteration就想,反正迭代求解bellman公式也是用vk来求得vk+1,但是需要迭代无穷步,那么我
只迭代一步,得到近似解就行了(反正外层还有个迭代),
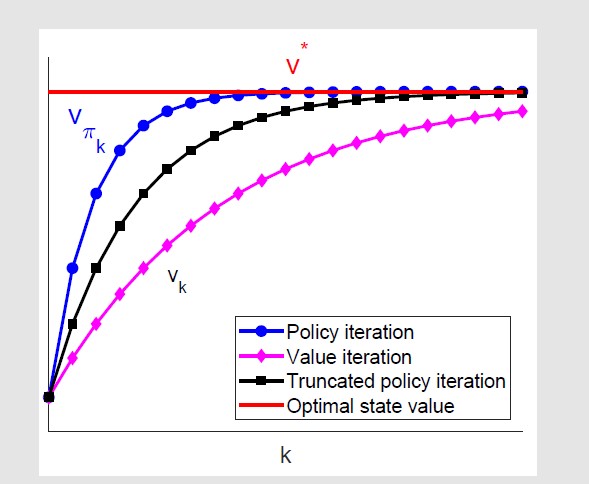
truncated policy iteration就是介于value iteration只走一步和policy iteration走无穷步之间的,走中间步,
从下图可以看到,truncated的收敛速度介于policy 和value iteration之间。因为在k相同时,policy iteration
实际上进行了更多的计算(迭代求解bellman公式),而value iteration没有迭代求解v。