Adaboost + decision tree
考虑将Adaboost和decision tree 结合起来的算法为:
在每轮decision tree的学习中,利用带权重$u^{(t)}$的样本集$D$训练得到最好的$g_t$;最后得出每个$g_t$所占的权重,线性组合得到$G$。
但是在AdaBoost-DTree中需要注意的一点是每个样本的权重$u^{(t)}$。但是在决策树模型中,例如C&RT算法中并没有引入$u^{(t)}$。那么,如何在决策树中引入这些权重$u^{(t)}$来得到不同的$g_t$而又不改变原来的决策树算法呢?
在Adaptive Boosting中,我们使用了weighted algorithm,形如:
$$
E_{in}^u(h)=\frac{1}{N}\sum_{n=1}^{N}u_n\cdot err(y_n,h(x_n))
$$
每个犯错误的样本点乘以相应的权重,求和再平均,最终得到了$E_{in}^u(h)$。如果在决策树中使用这种方法,将当前分支下犯错误的点赋予权重,每层分支都这样做,会比较复杂,不易求解。为了简化运算,保持决策树算法本身的稳定性和封闭性,我们可以把决策树算法当成一个黑盒子,即不改变其结构,不对算法本身进行修改,而从数据来源D’上做一些处理。按照这种思想,我们可以这样来看,如果对D’进行抽样,那么样本权重u实际上表示该样本在抽样中出现的次数,反映了它出现的概率;权重越大,出现概率越大。那么可以根据u值,对原样本集D进行一次重新的随机sampling,也就是带权重的随机抽样。sampling之后,会得到一个新的D’,D’中每个样本出现的几率与它权重u所占的比例应该是差不多接近的。因此,使用带权重的sampling操作,得到了新的样本数据集D’,可以直接代入决策树进行训练,从而无需改变决策树算法结构。这种对数据本身进行修改而不更改算法结构的方法非常重要!
所以,AdaBoost-DTree结合了AdaBoost和DTree,但是做了一点小小的改变,就是使用sampling替代权重$u^{(t)}$,效果是相同的。
上面我们通过使用sampling,将不同的样本集代入决策树中,得到不同的$g_t$。除此之外,我们还要确定每个$g_t$所占的权重$α_t$。之前我们在AdaBoost中已经介绍过,首先算出每个$g_t$的错误率$ϵ_t$,然后计算权重:
$$
α_t=ln\lozenge t=ln\sqrt{\frac{1-\epsilon_{t}}{\epsilon_{t}}}
$$
如果现在有一棵完全长成的树(fully grown tree),由所有的样本$x_n$训练得到。若每个样本都不相同的话,一刀刀切割分支,直到所有的$x_n$都被完全分开。这时候,$E_{in}(g_t)=0$,加权的$E_{in}^{u}(g_t)=0$,而且$ϵ_t$也为0,从而得到权重$α_t=∞$。$α_t=∞$表示该$g_t$所占的权重无限大,相当于它一个就决定了$G$结构,而其它的$g_t$对$G$没有影响。
显然$α_t=∞$不是我们想看到的,因为"独裁"总是不好的,我们希望使用aggregation将不同的$g_t$结合起来,发挥集体智慧来得到最好的模型$G$。首先,我们来看一下什么原因造成了$α_t=∞$。有两个原因:一个是使用了所有的样本$x_n$进行训练;一个是树的分支过多,fully grown。针对这两个原因,我们可以对树做一些修剪(pruned),比如只使用一部分样本,这在sampling的操作中已经起到这类作用,因为必然有些样本没有被采样到。除此之外,我们还可以限制树的高度,让分支不要那么多,从而避免树fully grown。
因此,AdaBoost-DTree使用的是pruned DTree,也就是说将这些预测效果较弱的树结合起来,得到最好的$G$,避免出现"独裁"。
刚才我们说了可以限制树的高度,那索性将树的高度限制到最低,即只有1层高的时候,有什么特性呢?当树高为1的时候,整棵树只有两个分支,切割一次即可。如果impurity是binary classification error的话,那么此时的AdaBoost-DTree即AdaBoost-Stump决策树桩。也就是说AdaBoost-Stump是AdaBoost-DTree的一种特殊情况。
值得一提是,如果树高为1时,通常较难遇到$ϵ_t=0$的情况,且一般不采用sampling的操作,而是直接将权重u代入到算法中。这是因为此时的AdaBoost-DTree就相当于是AdaBoost-Stump,而AdaBoost-Stump就是直接使用u来优化模型的。
从优化的角度来看Adaboost
对于二分类问题,我们知道AdaBoost中的权重的迭代计算如下所示:
$$
\begin{align}
u_{n}^{t+1}&=u_{n}^{t}\cdot \lozenge t^{-y_ng_t(x_n)}\\
&=u_{n}^{t}\cdot exp(-y_n\alpha_tg_t(x_n)
\end{align}
$$
其中,对于incorrect样本,$y_ng_t(x_n)<0$,对于correct样本,$y_ng_t(x_n)<0$。从上式可以看出,$u_{n}^{t+1}$由$u_{n}^{t}$与某个常数相乘得到。所以,最后一轮更新的$u_{n}^{t+1}$可以写成$u_{n}^{1}$的级联形式,我们之前令$u_{n}^{1}=1/N$,则有如下推导:
$$
u_{n}^{T+1}=u_n^1\cdot\prod_{t=1}^{T}exp(-y_n\alpha_tg_t(x_n))=\frac{1}{N}\cdot exp(-y_n\sum_{t=1}^{T}\alpha_tg_t(x_n))
$$
上式中$\sum_{t=1}^{T}\alpha_tg_t(x_n)$被称为voting score,最终的模型$G=sign(\sum_{t=1}^{T}\alpha_tg_t(x_n))$。可以看出,在AdaBoost中,$u_{n}^{T+1}$与$exp(-y_n\alpha_tg_t(x_n))$成正比。
接下来我们继续看一下voting score中蕴含了哪些内容。
$$
G(x_n)=sign \left (\overbrace{\sum_{t=1}^{T} \underbrace{\alpha_t}_{w_i}\underbrace{g_t(x_n)}_{\phi _i(x_n)}}^{voting \ score}\right )
$$
voting score由许多$g_t(x_n)$乘以各自的系数$α_t$线性组合而成。从另外一个角度来看,我们可以把$g_t(x_n)$看成是对$x_n$的特征转换$ϕ_i(x_n)$,$α_t$就是线性模型中的权重$w_i$。看到这里,我们回忆起之前SVM中,$w$与$ϕ(x_n)$的乘积再除以$w$的长度就是margin,即点到边界的距离。另外,乘积项再与$y_n$相乘,表示点的位置是在正确的那一侧还是错误的那一侧。所以,回过头来,这里的voting score实际上可以看成是没有正规化(没有除以w的长度)的距离,即可以看成是该点到分类边界距离的一种衡量。从效果上说,距离越大越好,也就是说voting score要尽可能大一些。
我们再来看,若voting score与$y_n$相乘,则表示一个有对错之分的距离。也就是说,如果二者相乘是负数,则表示该点在错误的一边,分类错误;如果二者相乘是正数,则表示该点在正确的一边,分类正确。所以,我们算法的目的就是让$y_n$与voting score的乘积是正的,而且越大越好。那么在刚刚推导的$u_{n}^{T+1}$中,若$exp(−y_n(voting score))$越小越好,那么$u_{n}^{T+1}$越小越好。也就是说,如果voting score表现不错,与$y_n$的乘积越大的话,那么相应的$u_{n}^{T+1}$应该是最小的。
那么在AdaBoost中,随着每轮学习的进行,每个样本的$u_{n}^{t}$是逐渐减小的,直到$u_{n}^{T+1}$最小。以上是从单个样本点来看的。总体来看,所有样本的$u_{n}^{T+1}$之和应该也是最小的。我们的目标就是在最后一轮(T+1)学习后,让所有样本的$u_{n}^{T+1}$之和尽可能地小。$u_{n}^{T+1}$之和表示为如下形式:
$$
\sum_{n=1}^{N}u_{n}^{T+1}=\frac{1}{N}\sum_{n=1}^{N}exp \left ( -y_n\sum_{t=1}^{T}\alpha_tg_t(x_n) \right)
$$
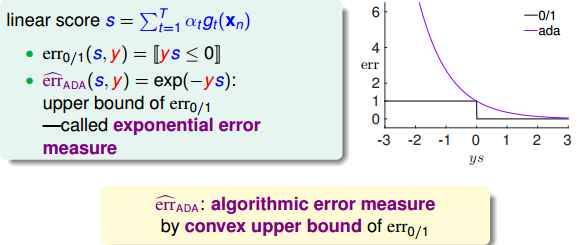
上式中,$\sum_{t=1}^{T}\alpha_tg_t(x_n)$用s来表示,对于0/1 error:若ys<0,则err0/1=1;若ys>=0,则err0/1=0。如下图右边黑色折线所示。对于上式中提到的指数error,即$\hat{err_{ADA}}=exp(−ys)$,随着ys的增加,error单调下降,且始终落在0/1 error折线的上面。如下图右边蓝色曲线所示。很明显,$\hat{err_{ADA}}$可以看成是0/1 error的上界。所以,我们可以使用$\hat{err_{ADA}}$来替代0/1 error,能达到同样的效果。从这点来说,$\sum_{n=1}^{N}u_{n}^{T+1}$可以看成是一种error measure,而我们的目标就是让其最小化,求出最小值时对应的各个$α_t$和$g_t(x_n)$。
下面我们来研究如何让$\sum_{n=1}^{N}u_{n}^{T+1}$取得最小值,思考是否能用梯度下降(gradient descent)的方法来进行求解。我们之前介绍过gradient descent的核心是在某点处做一阶泰勒展开:
$$
\mathop{\min}_{\left | v \right |=1}E_{in}(\boldsymbol{w}_t+\boldsymbol{\eta}\boldsymbol{v} )\approx E_{in}(\boldsymbol{w_t})+\eta\cdot\boldsymbol{v}^T\triangledown E_{in}(\boldsymbol{w}_t)
$$
其中,$\boldsymbol{w_t}$是泰勒展开的位置,$\boldsymbol{v}$是所要求的下降的最好方向,它是梯度$\triangledown E_{in}(\boldsymbol{w}_t)$的反方向,而η是每次前进的步长。则每次沿着当前梯度的反方向走一小步,就会不断逼近谷底(最小值)。这就是梯度下降算法所做的事情。
现在,我们对$\hat{E}_{ADA}$做梯度下降算法处理,区别是这里的方向是一个函数$g_t$,而不是一个向量$\boldsymbol{w_t}$。其实,函数和向量的唯一区别就是一个下标是连续的,另一个下标是离散的,二者在梯度下降算法应用上并没有大的区别。因此,按照梯度下降算法的展开式,做出如下推导:
$$
\begin{align}
\mathop{\min}_{h}\hat{E}_{ADA}&=\frac{1}{N}\sum_{n=1}^{N}exp\left( -y_n\left( \sum_{\tau=1}^{t-1}\alpha_{\tau}g_{\tau}(\boldsymbol{x}_n)+\eta h(\boldsymbol{x}_n)\right) \right )\\
&=\sum_{n=1}^{N}u_n^{t}\cdot exp(-y_n\eta h(\boldsymbol{x}_n))
\end{align}
$$
对函数$exp(-y_n\eta h(\boldsymbol{x}_n))$在$-y_n\eta h(\boldsymbol{x}_n)=0$做泰勒展开,上式为
$$
\begin{align}
\mathop{\min}_{h}\hat{E}_{ADA}
&\approx \sum_{n=1}^{N}u_n^{t}(1-y_n\eta h(x_n))\\
&=\sum_{n=1}^{N}u_n^{t}-\eta \sum_{n=1}^{N}u_n^{t}y_nh(x_n)
\end{align}
$$
上式中,$h(x_n)$表示当前的方向,它是一个$g_t$,η是沿着当前方向前进的步长。我们要求出这样的$h(x_n)$和η,使得$\hat{E}_{ADA}$是在不断减小的。当$\hat{E}_{ADA}$取得最小值的时候,那么所有的方向即最佳的$h(x_n)$和η就都解出来了。上述推导使用了在$-y_n\eta h(\boldsymbol{x}_n)=0$处的一阶泰勒展开近似。这样经过推导之后,$\hat{E}_{ADA}$被分解为两个部分,一个是前N个u之和$\sum_{n=1}^{N}u_n^{t}$,也就是当前所有的$E_{in}$之和;另外一个是包含下一步前进的方向$h(x_n)$和步进长度η的项$-\eta \sum_{n=1}^{N}u_n^{t}y_nh(x_n)$。$\hat{E}_{ADA}$的这种形式与gradient descent的形式基本是一致的。
那么接下来,如果要最小化$\hat{E}_{ADA}$的话,就要让第二项$-\eta \sum_{n=1}^{N}u_n^{t}y_nh(x_n)$越小越好。则我们的目标就是找到一个好的$h(x_n)$(即好的方向)来最小化$\sum_{n=1}^{N}u_n^{t}(-y_nh(x_n))$,此时先忽略步进长度η。
对于二分类问题,$y_n$和$h(x_n)$均限定取值-1或+1两种。我们对$\sum_{n=1}^{N}u_n^{t}(-y_nh(x_n))$做一些推导和平移运算:
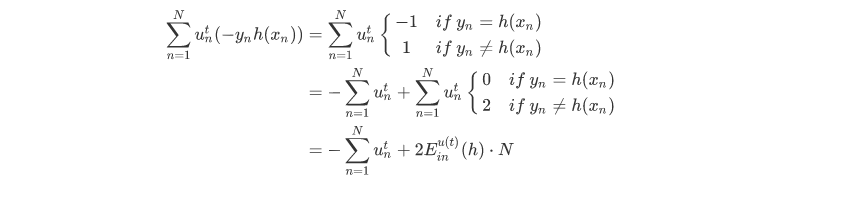
最终$\sum_{n=1}^{N}u_n^{t}(-y_nh(x_n))$化简为两项组成,一项是$-\sum_{n=1}^{N}u_n^{t}$;另一项是$2E_{in}^{u(t)}(h)\cdot N$。则最小化$\sum_{n=1}^{N}u_n^{t}(-y_nh(x_n))$就转化为最小化$E_{in}^{u(t)}(h)$。要让$E_{in}^{u(t)}(h)$最小化,正是由AdaBoost中的base algorithm所做的事情。所以说,AdaBoost中的base algorithm正好帮我们找到了梯度下降中下一步最好的函数方向。
从gradient descent角度验证了AdaBoost中使用base algorithm得到的$g_t$就是让$\hat{E}_{ADA}$减小的方向,只不过这个方向是一个函数而不是向量。
在解决了方向问题后,我们需要考虑步进长度η如何选取。方法是在确定方向$g_t$后,选取合适的η,使$\hat{E}_{ADA}$取得最小值。也就是说,把$\hat{E}_{ADA}$看成是步进长度η的函数,目标是找到$\hat{E}_{ADA}$最小化时对应的η值。
目的是找到在最佳方向上的最大步进长度,也就是steepest decent。我们先把$\hat{E}_{ADA}$表达式写下来:
$$
\hat{E}_{ADA}=\sum_{n=1}^{N}u_n^{t}\cdot exp(-y_n\eta g_t(\boldsymbol{x}_n))
$$
当$y_n=g_t(x_n)$时:$u_n^{t}\cdot exp(-\eta)$
当$y_n\neq g_t(x_n)$时:$u_n^{t}\cdot exp(+\eta)$
因此,
$$
\hat{E}_{ADA}=\sum_{n=1}^{N}u_n^{t}\cdot ((1-\epsilon_t)exp(-\eta)+\epsilon_texp(+\eta))
$$
然后对η求导,令$\frac{\partial \hat{E}_{ADA}}{\partial \eta}=0$,得:
$$
\eta_t=\sqrt{\frac{1-\epsilon_{t}}{\epsilon_{t}}}=\alpha_t
$$
由此看出,最大的步进长度就是$α_t$,即AdaBoost中计算$g_t$所占的权重。所以,AdaBoost算法所做的其实是在gradient descent上找到下降最快的方向和最大的步进长度。这里的方向就是$g_t$,它是一个函数,而步进长度就是$α_t$。也就是说,在AdaBoost中确定$g_t$和$α_t$的过程就相当于在gradient descent上寻找最快的下降方向和最大的步进长度。
Gradient Boosting
前面我们从gradient descent的角度来重新介绍了AdaBoost的最优化求解方法。整个过程可以概括为:
$$
\mathop{\min}_{\eta}\mathop{\min}_{h}\hat{E}_{ADA}=\frac{1}{N}\sum_{n=1}^{N}exp\left( -y_n\left( \sum_{\tau=1}^{t-1}\alpha_{\tau}g_{\tau}(\boldsymbol{x}_n)+\eta h(\boldsymbol{x}_n)\right) \right )
$$
以上是针对binary classification问题。如果往更一般的情况进行推广,对于不同的error function,比如logistic error function或者regression中的squared error function,那么这种做法是否仍然有效呢?这种情况下的GradientBoost可以写成如下形式:
$$
\mathop{\min}_{\eta}\mathop{\min}_{h}\hat{E}_{ADA}=\frac{1}{N}\sum_{n=1}^{N}err\left(\left( \sum_{\tau=1}^{t-1}\alpha_{\tau}g_{\tau}(\boldsymbol{x}_n)+\eta h(\boldsymbol{x}_n)\right), y_n \right )
$$
仍然按照gradient descent的思想,上式中,$h(x_n)$是下一步前进的方向,η是步进长度。此时的error function不是前面所讲的exp了,而是任意的一种error function。因此,对应的hypothesis也不再是binary classification,最常用的是实数输出的hypothesis,例如regression。最终的目标也是求解最佳的前进方向$(x_n)$和最快的步进长度η。
以regression为例,它的表达式如下所示:
$$
\mathop{\min}_{\eta}\mathop{\min}_{h}\hat{E}_{ADA}=\frac{1}{N}\sum_{n=1}^{N}err\left(\left( \underbrace{\sum_{\tau=1}^{t-1}\alpha_{\tau}g_{\tau}(\boldsymbol{x}_n)}_{s_n}+\eta h(\boldsymbol{x}_n)\right), y_n \right )
$$
其中,$err(s,y)=(s-y)^2$
我们把上式进行一阶泰勒展开,写成梯度的形式:
$$
\begin{align}
\mathop{\min}_{h}...&\approx \mathop{\min}_{h}\frac{1}{N}\sum_{n=1}^{N}err(s_n,y_n)+\frac{1}{N}\sum_{n=1}^{N}\eta h(x_n)\frac{\partial err(s,y_n)}{\partial s}|_{s=s_n}\\
&=\mathop{\min}_{h}constants+\frac{\eta}{N}\sum_{n=1}^{N}h(x_n)\cdot 2(s_n-y_n)
\end{align}
$$
上式中,由于regression的error function是squared的,所以,对s的导数就是$2(s_n-y_n)$。 很明显,要使上式最小化,只要令$h(x_n)$是梯度$2(s_n-y_n)$的反方向就行了,即$h(x_n)=2(s_n-y_n)$。但是直接这样赋值,并没有对$h(x_n)$的大小进行限制,一般不直接利用这个关系求出$h(x_n)$。
实际上$h(x_n)$的大小并不重要,因为有步进长度η。那么,我们上面的最小化问题中需要对$h(x_n)$的大小做些限制。限制$h(x_n)$的一种简单做法是把$h(x_n)$的大小$h^2(x_n)$当成一个惩罚项添加到上面的最小化问题中,这种做法与regularization类似。如下图所示,经过推导和整理,忽略常数项,我们得到最关心的式子是:
$$
min\sum_{n=1}^{N}(h(x_n)-(y_n-s_n))^2
$$
上式是一个完全平方项之和,$(y_n-s_n)$表示当前第n个样本真实值和预测值的差,称之为残差。残差表示当前预测能够做到的效果与真实值的差值是多少。那么,如果我们想要让上式最小化,求出对应的$h(x_n)$的话,只要让$h(x_n)$尽可能地接近余数$(y_n-s_n)$即可。在平方误差上尽可能接近其实很简单,就是使用regression的方法,对所有N个点$(x_n,(y_n-s_n))$做squared-error的regression,得到的回归方程就是我们要求的$g_t(x_n)$。
在求出最好的方向函数$g_t(x_n)$之后,就要来求相应的步进长度η。表达式如下:
$$
\mathop{\min}_{\eta}\hat{E}_{ADA}=\frac{1}{N}\sum_{n=1}^{N}err\left(\left( \underbrace{\sum_{\tau=1}^{t-1}\alpha_{\tau}g_{\tau}(\boldsymbol{x}_n)}_{s_n}+\eta h(\boldsymbol{x}_n)\right), y_n \right )
$$
其中,$err(s,y)=(s-y)^2$,将上式化简下得到
$$
\mathop{\min}_{\eta}\frac{1}{N}\sum_{n=1}^{N}(s_n+\eta g_t(x_n)-y_n)^2=\frac{1}{N}\sum_{n=1}^{N}((y_n-s_n)-\eta g_t(x_n))^2
$$
上式中也包含了残差$(y_n-s_n)$,其中$g_t(x_n)$可以看成是$x_n$的特征转换,是已知量。那么,如果我们想要让上式最小化,求出对应的η的话,只要让$\eta g_t(x_n)$尽可能地接近残差$(y_n-s_n)$即可。显然,这也是一个regression问题,而且是一个很简单的形如y=ax的线性回归,只有一个未知数η。只要对所有N个点$(\eta g_t(x_n),y_n−s_n)$做squared-error的linear regression,求出η即可。
将上述这些概念合并到一起,我们就得到了一个最终的演算法Gradient Boosted Decision Tree(GBDT)。可能有人会问,我们刚才一直没有说到Decison Tree,只是讲到了GradientBoost啊?下面我们来看看Decison Tree究竟是在哪出现并使用的。其实刚刚我们在计算方向函数gtgt的时候,是对所有N个点$(x_n,(y_n-s_n))$做squared-error的regression。那么这个回归算法就可以是决策树C&RT模型(决策树也可以用来做regression)。这样,就引入了Decision Tree,并将GradientBoost和Decision Tree结合起来,构成了真正的GBDT算法。GBDT算法的基本流程图如下所示:
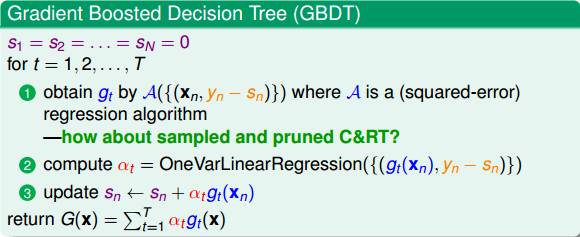
值得注意的是,$s_n$的初始值一般均设为0,即$s_1=s_2=⋯=s_N=0$。每轮迭代中,方向函数$g_t$通过C&RT算法做regression,进行求解;步进长度η通过简单的单参数线性回归进行求解;然后每轮更新sn的值,即$s_n←s_n+α_tg_t(x_n)$。T轮迭代结束后,最终得到$G(x)=\sum_{t=1}^{T}\alpha_tg_t(x)$。
值得一提的是,本节课第一部分介绍的AdaBoost-DTree是解决binary classification问题,而此处介绍的GBDT是解决regression问题。二者具有一定的相似性,可以说GBDT就是AdaBoost-DTree的regression版本。
Summary of Aggregation Models
我们已经介绍完所有的aggregation模型了。接下来,我们将对这些内容进行一个简单的总结和概括。
首先,我们介绍了blending。blending就是将所有已知的$g_t$ aggregate结合起来,发挥集体的智慧得到$G$。值得注意的一点是这里的$g_t$都是已知的。blending通常有三种形式:
- uniform:简单地计算所有$g_t$的平均值
- non-uniform:所有$g_t$的线性组合
- conditional:所有$g_t$的非线性组合
其中,uniform采用投票、求平均的形式更注重稳定性;而non-uniform和conditional追求的更复杂准确的模型,但存在过拟合的危险。
刚才讲的blending是建立在所有$g_t$已知的情况。那如果所有$g_t$未知的情况,对应的就是learning模型,做法就是一边学$g_t$,一边将它们结合起来。learning通常也有三种形式(与blending的三种形式一一对应):
- Bagging:通过bootstrap方法,得到不同$g_t$,计算所有$g_t$的平均值
- AdaBoost:通过re-weighting样本权重方法,得到不同$g_t$,所有$g_t$的线性组合
- Decision Tree:通过数据分割的形式得到不同的$g_t$,所有$g_t$的非线性组合
除了这些基本的aggregation模型之外,我们还可以把某些模型结合起来得到新的aggregation模型。例如,Bagging与Decision Tree结合起来组成了Random Forest。Random Forest中的Decision Tree是比较“茂盛”的树,即每个树的$g_t$都比较强一些。AdaBoost与Decision Tree结合组成了AdaBoost-DTree。AdaBoost-DTree的Decision Tree是比较“矮弱”的树,即每个树的$g_t$都比较弱一些,由AdaBoost将所有弱弱的树结合起来,让综合能力更强。同样,GradientBoost与Decision Tree结合就构成了经典的算法GBDT。
Aggregation的核心是将所有的$g_t$结合起来,融合到一起,即集体智慧的思想。这种做法之所以能得到很好的模型G,是因为aggregation具有两个方面的优点:cure underfitting和cure overfitting。
第一,aggregation models有助于防止欠拟合(underfitting)。它把所有比较弱的$g_t$结合起来,利用集体智慧来获得比较好的模型G。aggregation就相当于是feature transform,来获得复杂的学习模型。
第二,aggregation models有助于防止过拟合(overfitting)。它把所有$g_t$进行组合,容易得到一个比较中庸的模型,类似于SVM的large margin一样的效果,从而避免一些极端情况包括过拟合的发生。从这个角度来说,aggregation起到了regularization的效果。
由于aggregation具有这两个方面的优点,所以在实际应用中aggregation models都有很好的表现。
总结
主要介绍了Gradient Boosted Decision Tree。首先讲如何将AdaBoost与Decision Tree结合起来,即通过sampling和pruning的方法得到AdaBoost-D Tree模型。然后,我们从optimization的角度来看AdaBoost,找到好的hypothesis也就是找到一个好的方向,找到权重αα也就是找到合适的步进长度。接着,我们从binary classification的0/1 error推广到其它的error function,从Gradient Boosting角度推导了regression的squared error形式。Gradient Boosting其实就是不断迭代,做residual fitting。并将其与Decision Tree算法结合,得到了经典的GBDT算法。最后,我们将所有的aggregation models做了总结和概括,这些模型有的能防止欠拟合有的能防止过拟合,应用十分广泛。
思考
$$
\mathop{\min}_{\eta}\mathop{\min}_{h}\hat{E}_{ADA}=\frac{1}{N}\sum_{n=1}^{N}exp\left( -y_n\left( \sum_{\tau=1}^{t-1}\alpha_{\tau}g_{\tau}(\boldsymbol{x}_n)+\eta h(\boldsymbol{x}_n)\right) \right )
$$
Q:为什么可以对上面这个式子做梯度下降??这个函数是关于h(x)的凸函数吗?如何证明?
A:前向分步算法+泰勒一阶展开 决定的。跟凸函数无关
个人总结
Adaboost+decision就是统计学习方法第147页说的提升树
说白了,adaboost、提升树、gbdt 就是加法模型+前向分步算法
adaboost用于处理二分类问题,损失函数为指数损失函数,且有样本权重的概念,基模型的权重是根据加权误分类率决定的
gbdt不仅可用于分类,还可用于回归,损失函数可以为平方损失或其他一般的损失函数,基模型的权重是通过解一个一维最优化问题得到的
其实adaboost的样本权重和gbdt的上一步模型的残差本质上是一个东西
加法模型+前向分步算法
加法模型为
$$
G(x)=\sum_{t=1}^{T}\alpha_tg_t(x;\theta_t)
$$
其中,$g_t(x;\theta_t)$为基函数,$\theta_t$为基函数的参数,$\alpha_t$为基函数的系数。
在给定训练数据和损失函数$L(y,G(x))$的条件下,学习加法模型成为经验风险最小化即损失函数最小化问题:
$$
\mathop{\min}_{\alpha_t,\theta_t}\sum_{i=1}^{N}L\left (y_i,\sum_{t=1}^{T}\alpha_tg_t(x_i;\theta_t) \right)
$$
通常这是一个复杂的优化问题,前向分步算法求解这一优化问题的想法是:因为学习的是加法模型,如果能从前向后,每一步只学习一个基函数及其系数,逐步逼近优化目标函数式(19),那么就可以简化优化的复杂度,具体的,每一步只需极小化如下损失函数就可以得到每一步的$\alpha_t$和$\theta_t$:
$$
(\alpha_t,\theta_t)=\mathop{\arg \min}_{\alpha,\theta}\sum_{i=1}^{N}L\left (y_i,G_{t-1}(x_i)+\alpha g(x_i;\theta) \right)
$$
这样,前向分步算法将同时求解从t=1到T所有参数$\alpha_t,\theta_t$的优化问题转化为逐次求解各个$\alpha_t,\theta_t$的优化问题。
adaboost算法就是由前向分步算法推导出来的
提升树
boosting(提升方法)实际就是加法模型(即基函数的线性组合)与前向分步算法。
以决策树为基函数的提升方法成为提升树,对分类问题决策树是二叉分类树,对回归问题决策树是二叉回归树。
提升树模型可以表示为决策树的加法模型:
$$
f_M(x)=\sum_{m=1}^{M}T(x;\Theta_m)
$$
其中,$T(x;\Theta_m)$表示决策树,$\Theta_m$为决策树的参数,M为树的个数,注意这里每棵树前面没有系数$\alpha_t$,这是因为系数可以包含在决策树的输出中
针对不同问题的提升树学习算法,其主要区别在于使用的损失函数不同,包括用平方误差损失函数的回归问题,用指数损失函数的分类问题,用一般损失函数的一般决策问题。
- 对于二分类问题,且损失函数为指数损失函数的时候,提升树算法即基分类器为二分类树的adaboost算法。
- 对于回归问题,每棵树可以表示成:
$$
T(x;\Theta_m)=\sum_{j=1}^{J}c_jI(x\in R_j)
$$
在前向分步算法的第m步,给定当前模型$f_{m-1}(x)$,需求解
$$
\hat{\Theta}_m=\mathop{\arg \min}_{\Theta}\sum_{i=1}^{N}L\left (y_i,f_{m-1}(x_i)+T(x_i;\Theta)\right)
$$
得到$\hat{\Theta}_m$,即第m棵树的参数。
当采用平方误差损失函数时,
$$
L(y,f(x))=(y-f(x))^2
$$
第m步的损失为
$$
\begin{align}
L\left (y,f_{m-1}(x)+T(x;\Theta_m)\right)&=\left [y-f_{m-1}(x)-T(x;\Theta_m)\right]^2\\
&=[r-T(x;\Theta_m)]^2
\end{align}
$$
这里,
$$
r=y-f_{m-1}(x)
$$
是当前模型拟合数据的残差,所以,对平方损失回归问题的提升树算法来说,只需简单地拟合当前模型的残 差,就可以得到第m棵树的最优参数$\Theta_m$。
- 那么问题来了,对于平方损失回归问题的提升树算法来说,只需简单地拟合当前模型的残差,就可以让损失函数最小,从而得到第m棵树的最优参数$\Theta_m$;但是对于一般的损失函数,我们有时候不知道通过拟合什么来让损失函数最小,得到让损失函数最小的最优参数$\Theta_m$,这时候该怎么办呢?
梯度提升树
但是对于一般的损失函数,我们有时候不知道通过拟合什么来让损失函数最小,得到让损失函数最小的最优参数$\Theta_m$,这时候该怎么办呢?
这句话怎么理解呢?可以回忆一下在逻辑斯蒂回归中交叉熵损失函数最小时的参数$\mathbf{w}$,也就是$\nabla E_{in}(\mathbf{w})=0$时的参数$\mathbf{w}$,但是这个方程没有闭式解,即我们不知道最优的$\mathbf{w}$长什么样子来让损失函数最小。现在说清楚了吧。
"一下子优化"和“逐步优化”
问题又来了,既然很难一下子得到最优的$g_t$,该怎么做呢?
一个很自然的想法是,既然这个问题可以类比逻辑斯蒂回归中的损失函数最优化问题,那么我们看看在lr中是怎么解决这个问题不就行了吗?是的,没错!
逻辑斯蒂回归中解决这个问题的方法是梯度下降法,由于损失函数是凸函数,只要保证第t+1轮的损失比第t轮的小$E_{in}(\mathbf{w}_{t+1})<E_{in}(\mathbf{w}_{t})$,那么经过一定次数T的迭代后,就可以保证$E_{in}(\mathbf{w}_{T})$达到最小。
推广到这个问题,我们只要保证第t轮加入的基函数$g_t(x)$加入到当前模型$G_{t-1}(x)$后的损失比当前模型$G_{t-1}(x)$的损失小,那么经过一定次数T的迭代后,就可以保证最后的模型$G_{T}(x)$的损失很小。
怎样保证$Loss(G_{t-1}(x)+\alpha_tg_t(x))<Loss(G_{t-1}(x))$呢?泰勒展开!!
观察下Loss的表达式
$$
\sum_{i=1}^{N}L(y_i,G_{t-1}(x_i)+\alpha_tg_t(x_i))
$$
对这个函数在$G(x)=G_{t-1}(x)$处泰勒一阶展开,
$$
\sum_{i=1}^{N}L(y_i,G_{t-1}(x_i)+\alpha_tg_t(x_i))=\sum_{i=1}^{N}L(y_i,G_{t-1}(x_i))+\alpha_tg_t(x_i)\left [ \frac{\partial L(y_i,G(x_i))}{\partial G(x_i) }\right ]_{G(x)=G_{t-1}(x)}
$$
由于$\alpha_t$是大于0的,若
$$
g_t(x_i)=-\left [ \frac{\partial L(y_i,G(x_i))}{\partial G(x_i) }\right ]_{G(x)=G_{t-1}(x)}
$$
则
$$
\sum_{i=1}^{N}L(y_i,G_{t-1}(x_i)+\alpha_tg_t(x_i))\leq\sum_{i=1}^{N}L(y_i,G_{t-1}(x_i))
$$
式(28)就告诉了我们如何得到$g_t(x)$,这是一个回归问题。
有了$g_t(x)$后,很容易得到$\alpha_t$,这是一个一维搜索问题。
思考下lr中的梯度下降和gbdt的梯度提升,下降的是损失,提升的是表现,本质都是逐步降低损失值。因此梯度提升树叫做梯度下降树也无妨~~
参考
李航 统计学习方法
林轩田 机器学习技法